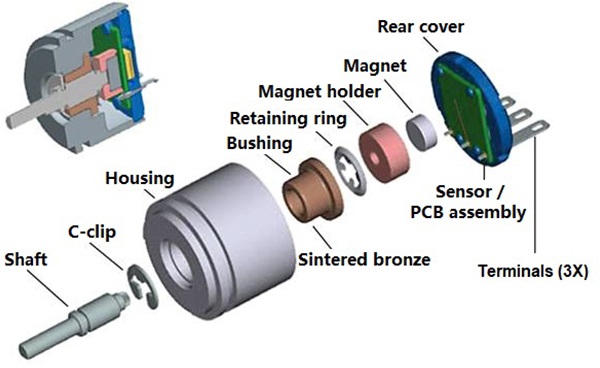
마그네틱 로터리 엔코더를 분해할 기회가 있다면 일반적으로 위와 같은 내부 구조를 볼 수 있습니다. 마그네틱 엔코더는 기계식 샤프트, 쉘 구조, 엔코더 끝단의 PCB 어셈블리, 소형 엔코더로 구성됩니다.디스크 자석기계 샤프트 끝의 샤프트와 함께 회전합니다.
자기 인코더는 회전 위치 피드백을 어떻게 측정합니까?
홀 효과(Hall Effect): 전류 흐름에 수직인 방향으로 자기장이 적용될 때 전류가 흐르는 도체에 전위차가 발생하는 현상.
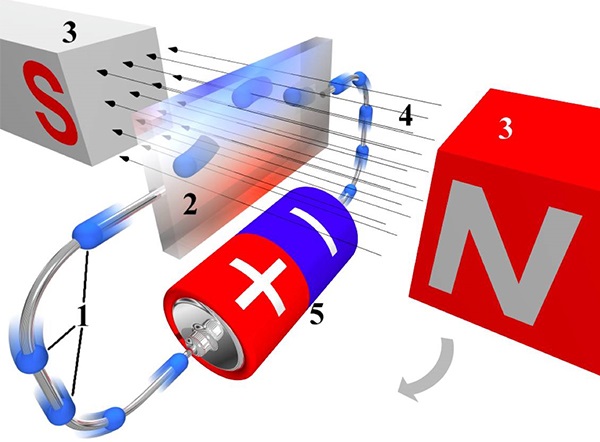
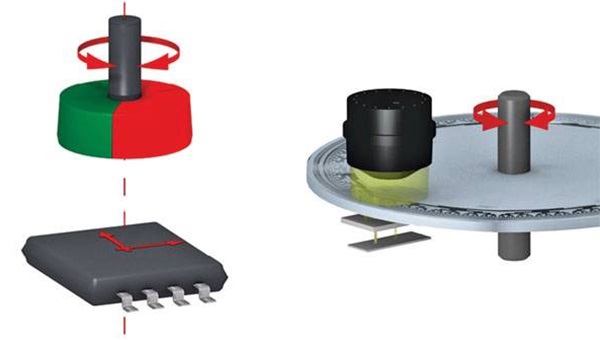
전류 흐름 경로를 축으로 하여 도체에 인가된 자기장을 위의 화살표 방향으로 회전시키면 자기장과 도체 사이의 각도 변화로 인해 홀 전위차가 변화하게 되며, 전위차의 변화 추세는 정현파 곡선입니다. 따라서 통전된 도체의 양쪽 전압을 기준으로 자기장의 회전 각도를 역으로 계산할 수 있습니다. 이는 회전 위치 피드백을 측정할 때 자기 인코더의 기본 작동 메커니즘입니다.
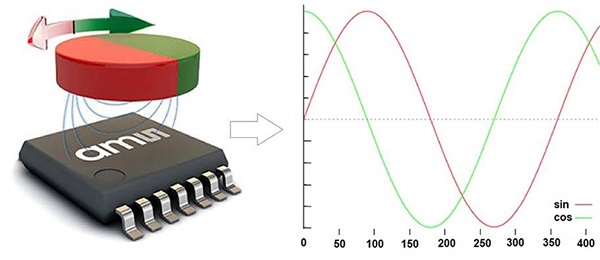
리졸버가 서로 수직인 두 세트의 출력 코일을 사용하는 원리와 유사하게 자기장의 회전 위치 간의 고유한 대응을 보장하려면 자기 인코더에도 서로 수직인 전류 방향을 갖는 두 개(또는 두 쌍)의 홀 유도 요소가 필요합니다. 및 출력 전압(조합).
오늘날 자기 인코더에 사용되는 홀 센서(칩)는 일반적으로 홀 반도체 부품과 관련 신호 처리 및 조절 회로를 통합할 뿐만 아니라 사인 및 코사인 아날로그와 같은 다양한 유형의 신호 출력 모듈을 통합하는 높은 수준의 통합을 가지고 있습니다. 신호, 구형파 디지털 레벨 신호 또는 버스 통신 출력 장치.
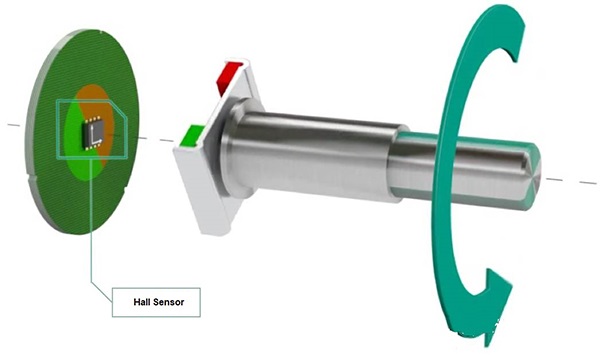
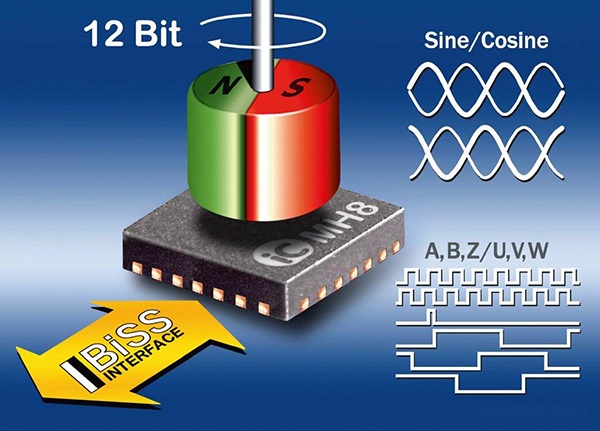
이렇게 엔코더 회전축 끝단에 자기장을 발생시키는 네오디뮴 소결자석과 같은 영구자석을 설치하고 위에서 언급한 홀 센서 칩을 PCB 회로기판 위에 놓고 엔코더 끝단의 영구자석에 접근하게 된다. 특정 요구 사항(방향 및 거리)에 따른 샤프트.
PCB 회로 기판을 통해 홀 센서에서 출력되는 전압 신호를 분석하여 엔코더 로터의 회전 위치를 식별할 수 있습니다.
자기 인코딩의 구조와 작동 원리에 따라 영구 자석에 대한 특별한 요구 사항(예: 자석 재질, 자석 모양, 자화 방향 등)이 결정됩니다. 일반적으로정방향 자화 네오디뮴 자석디스크는 최고의 자석 옵션입니다. Ningbo Horizon Magnetics는 다양한 크기의 자기 인코딩 제조업체를 공급한 경험이 있습니다.직경 네오디뮴 디스크 자석, D6x2.5mm 및 D10x2.5mm 직경 디스크 네오디뮴 자석이 가장 인기 있는 모델입니다.
기존 광학 인코더에 비해 자기 인코더는 복잡한 코드 디스크와 광원이 필요하지 않고 구성 요소 수가 적으며 감지 구조가 더 간단하다는 것을 알 수 있습니다. 또한 홀 요소 자체는 견고한 구조, 작은 크기, 가벼운 무게, 긴 서비스 수명, 진동 저항, 먼지, 기름, 수증기 및 염분 오염 또는 부식 대기를 두려워하지 않는 등 많은 장점을 가지고 있습니다.
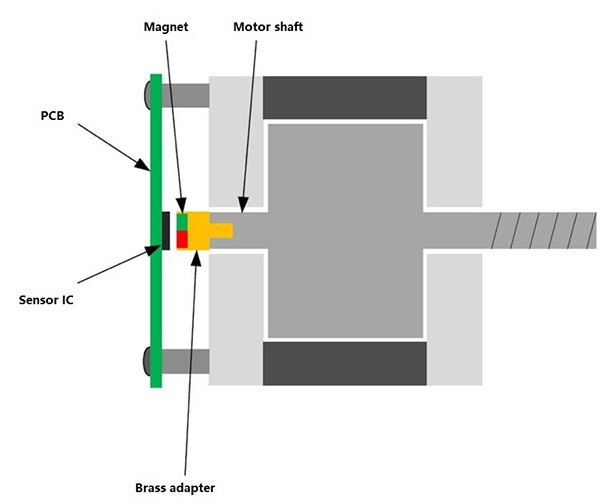
전동기의 회전 위치 피드백에 자기 엔코더 기술을 적용하면,소결된 NdFeB 자석 실린더자기 엔코더는 모터 샤프트 끝에 직접 설치할 수 있습니다. 이러한 방식으로 기존 피드백 엔코더를 사용할 때 필요한 과도 커플링 베어링(또는 커플링)을 제거하고 비접촉식 위치 측정을 달성할 수 있습니다. 이를 통해 기계 샤프트의 진동으로 인한 엔코더 고장(또는 손상) 위험을 줄일 수 있습니다. 전기 모터의 작동. 따라서 전기 모터 작동의 안정성을 향상시키는 데 도움이 됩니다.
게시 시간: 2022년 7월 21일